

PID Controller in Ship & Pneumatic PID Controller in Ship
1:- PID Controller System
- A PID (Proportional – Integral – Derivative) controller is a control system widely used in ships to regulate process variables like temperature, pressure, flow, and speed.
- PID controllers maintain a process as close to the desired setpoint as possible using a feedback loop.
- PID controllers are incredibly stable and accurate, making them one of the most popular choices in the shipping industry.
2:- PID Controller Working
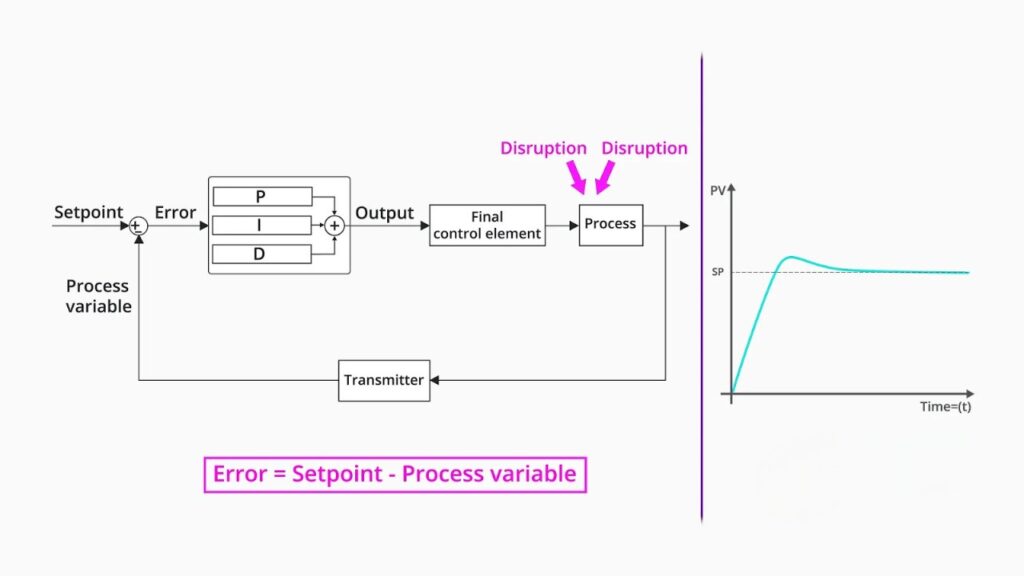
PID controllers operate by adjusting their output based on three elements: Proportional, Integral, and Derivative. These components work together to keep the output close to the target or setpoint. Here’s a brief overview:
- Proportional (P): Adjusts the output based on the present error.
- Integral (I): Focuses on past errors to accumulate adjustments over time.
- Derivative (D): Predicts future errors and adjusts accordingly to minimize overshoot.
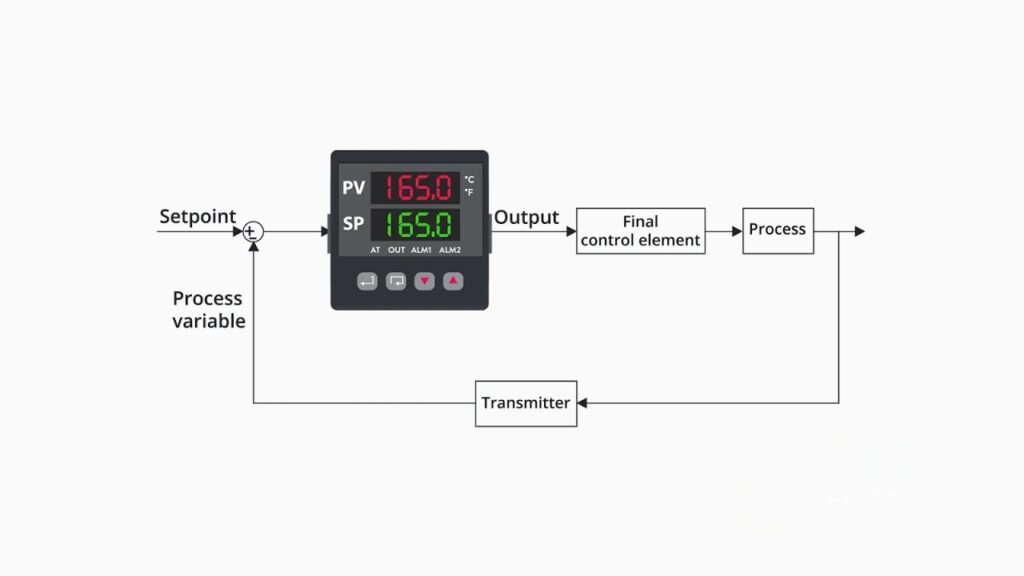
3:- Closed-Loop System in a PID Controller
A closed-loop system is essential for a PID controller to function. It continuously compares the actual output with the setpoint, correcting any error (difference between the two).
The system includes sensors to measure the output, a control unit to compare it, and an actuator to modify the behavior.
4:- PID Controller Tuning
To work optimally, a PID controller needs to be properly tuned. This involves adjusting the Proportional, Integral, and Derivative terms for the specific system. A well-tuned PID controller can manage processes with frequent load changes, ensuring stability and precision.
5:- Types of PID Controllers
There are three main types of controllers:
- On-Off Controllers: Simple but less accurate. They switch output fully on or off when the setpoint is reached.
- Proportional Controllers: Gradually reduce output as the setpoint is approached to prevent overshoot.
- PID Controllers: Combine the best aspects of proportional, integral, and derivative control for the highest accuracy.
6:- PID Controller Applications
PID controllers are used across many industries. Some common applications include:
- Heat Treatment: Ensuring precise temperature control for metalworking.
- Baking: Regulating temperature in commercial ovens.
- Drying and Curing: Controlling temperature in processes involving paint or rubber to prevent damage.
7:- What is a Pneumatic PID Controller
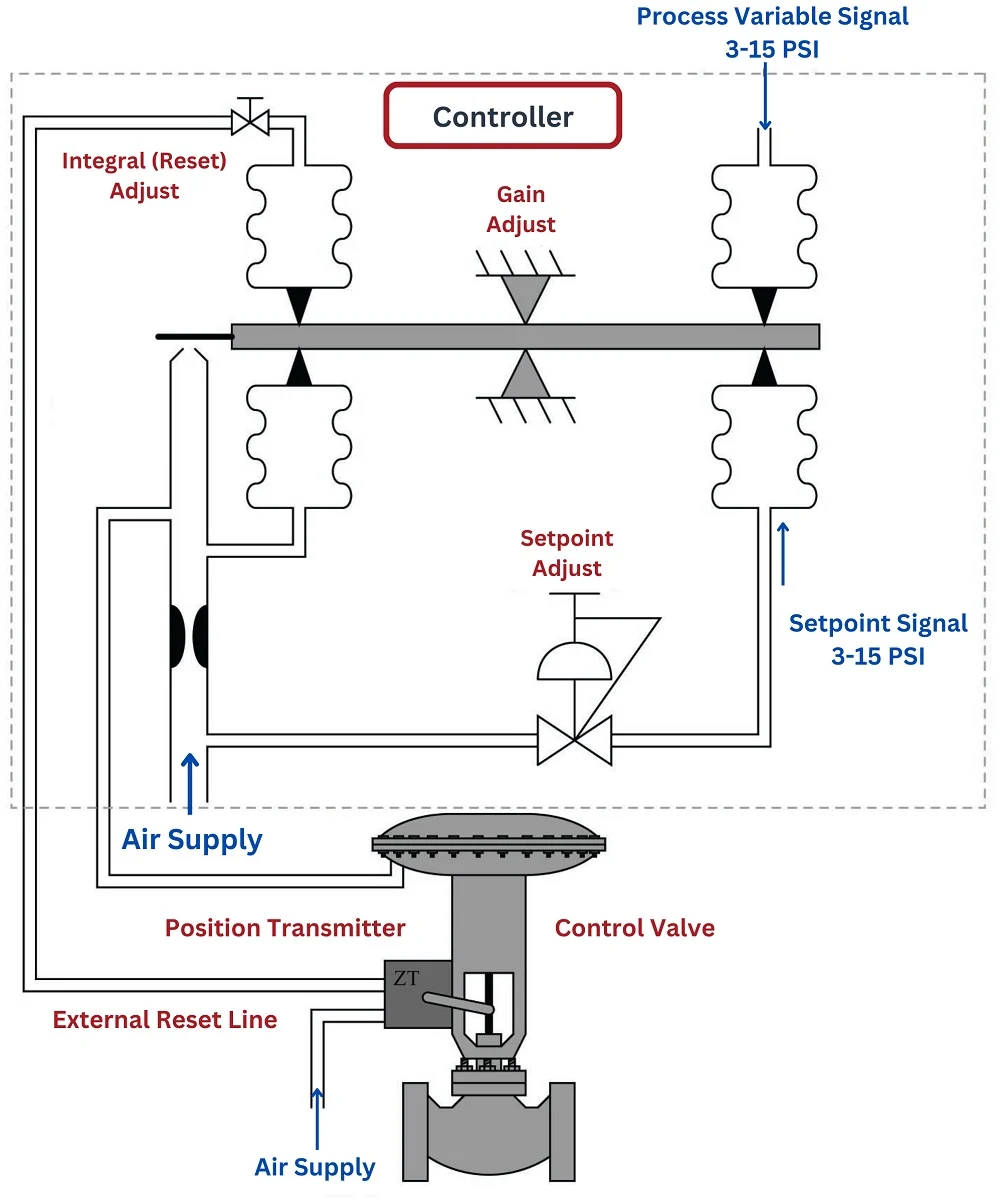
Pneumatic PID controllers are systems that use variable air pressure as signals to control various processes.
These systems are used to provide Proportional (P), Integral (I), and Derivative (D) responses, with gain values controlled through mechanical components such as valves.
The main function of a pneumatic controller is to receive a process variable (PV) signal as a variable air pressure, compare it to a desired setpoint (SP), and generate an output signal to drive a final control element.
Motion-Balance Principle
- In motion-balance systems, the mechanism freely moves as signal pressures change.
- Unlike force-balance systems, motion-balance systems allow the lever to tilt, maintaining the nozzle gap.
- Changes in nozzle backpressure as the lever moves allow for control.
- This system can be designed for direct or reverse action, depending on how input pressures are connected.
Gain Adjustment (Force-Balance Principle)
- In force-balance controllers, gain adjustment is achieved by influencing the ratio of input to output pressure.
- Moving the fulcrum closer to the output bellows increases gain, requiring a larger change in output pressure for a given input change.
- Moving the fulcrum farther from the output bellows decreases gain, making the system more sensitive to input changes.
Gain Adjustment (Motion-Balance Principle):
- Gain adjustment is done by repositioning the nozzle along the lever’s length.
- Moving the nozzle closer to the output below decreases gain, as less movement is needed to maintain the gap.
- Moving the nozzle closer to the input increases gain, requiring larger output movements for input pressure changes.
7.1:- Proportional Control
- The force-balance principle is used in pneumatic controllers for proportional control.
- Input signals (pneumatic pressures) exert forces on a beam via diaphragms or bellows.
- These forces are balanced by output air pressure in the opposite direction.
- The goal is to keep the beam balanced and motionless using a nozzle/baffle mechanism.
- Direct action: An increase in process variable (PV) pressure leads to a proportional increase in output pressure.
7.2:- Derivative Control
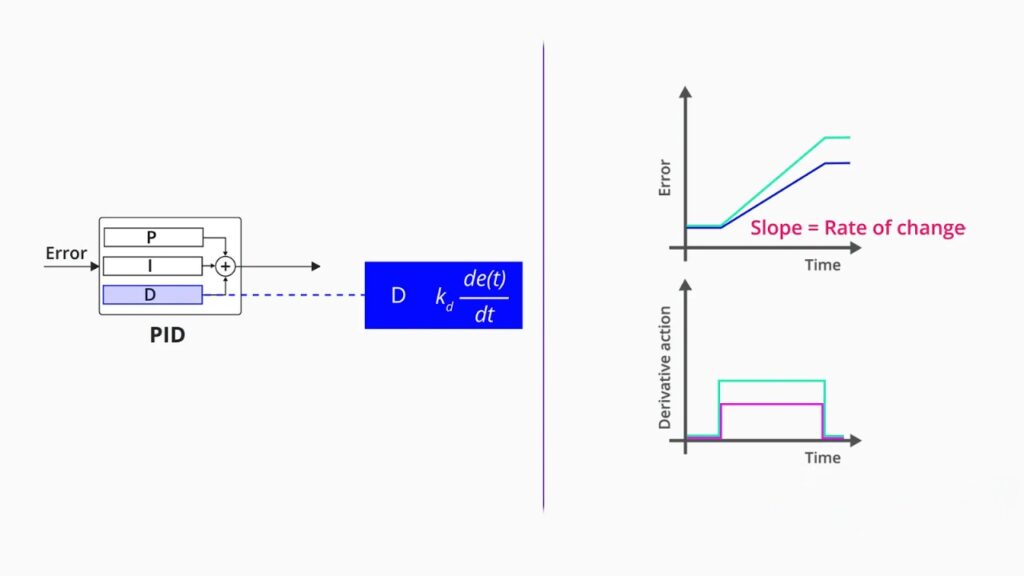
- Derivative action is added by introducing a restrictor valve between the nozzle and the feedback bellows.
- This causes a delay in the feedback bellows response, creating a derivative effect.
- When a sudden change in PV or SP occurs, the output pressure spikes, providing a rate-of-change response.
7.3:- Integral Control
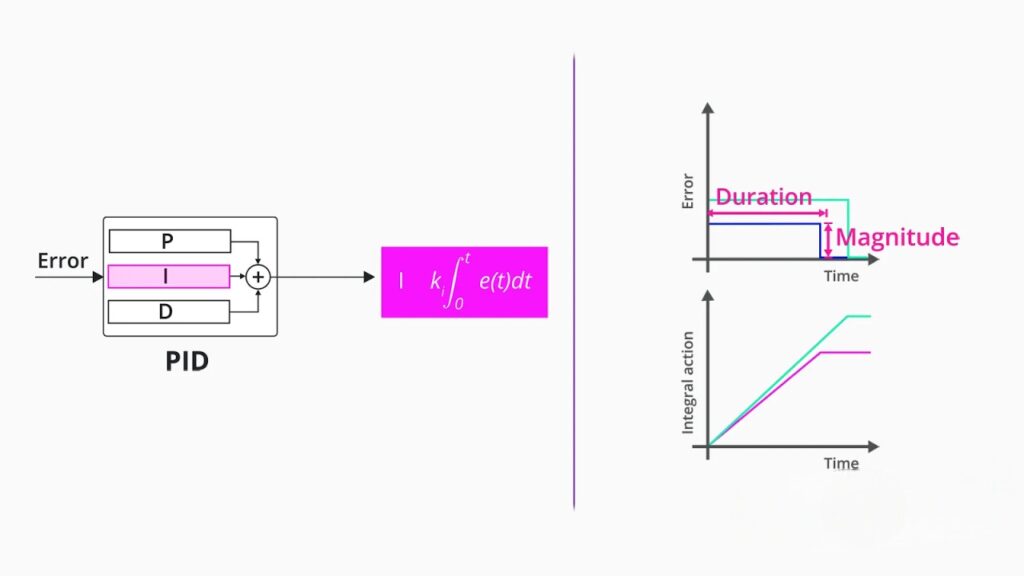
- Integral action is introduced with a reset bellows, opposing the feedback bellows.
- A restrictor valve creates a time delay, allowing the reset bellows to fill gradually.
- Over time, the reset bellows increase the output pressure, correcting any long-term offset between PV and SP.
8:- Conclusion

- PID controllers are important in the maritime industry for automation, effectively regulating process variables like temperature, pressure, and flow through a feedback loop to maintain stability and accuracy.
- By combining Proportional, Integral, and Derivative, PID controllers provide a balanced approach that improves system responsiveness and minimizes errors over time, eventually increasing its efficiency.
- PID controllers are widely used onboard ships for boiler-level monitoring, ensuring precise control and efficiency in critical processes.
9:- FAQ Questions About PID Controllers
- What is a PID Controller?
- A PID (Proportional-Integral-Derivative) controller is a control system used to regulate process variables like temperature, pressure, and flow in industrial settings.
- How does a PID Controller work?
- PID controllers adjust their output based on three components: Proportional (reacts to current error), Integral (addresses past errors), and Derivative (anticipates future errors).
- What is a closed-loop system in PID controllers?
- A closed-loop system continuously compares the actual output with the setpoint, using sensors and actuators to correct any discrepancies.
- Why is tuning important for a PID Controller?
- Proper tuning of the Proportional, Integral, and Derivative terms is essential for optimal performance, ensuring stability and precision in managing processes.
- What are common applications of PID Controllers?
- PID controllers are widely used in industries such as heat treatment, baking, and drying processes, where precise control of temperature and other variables is crucial.
Disclaimer :- The opinions expressed in this article belong solely to the author and may not necessarily reflect those of Merchant Navy Decoded. We cannot guarantee the accuracy of the information provided and disclaim any responsibility for it. Data and visuals used are sourced from publicly available information and may not be authenticated by any regulatory body. Reviews and comments appearing on our blogs represent the opinions of individuals and do not necessarily reflect the views of Merchant Navy Decoded. We are not responsible for any loss or damage resulting from reliance on these reviews or comments.
Reproduction, copying, sharing, or use of the article or images in any form is strictly prohibited without prior permission from both the author and Merchant Navy Decoded.

very good it help me clear my exam
Glad it helped. Let us know if you need any guidance.